Working with ragdolls in Unity usually involves a tradeoff between physical behavior and control. Fully simulated characters react well to forces but are hard to guide, while animation-driven characters stay stable but lack physical response.
Rawad (Rudy) Akar, has been working on a self-balancing active ragdoll system that sits between those two. The project comes from a long-standing interest in robotics and physics-driven characters, shaped by his experience as a VR developer with multiple published titles.
The system combines rigidbody physics with procedural animation to keep characters upright, step dynamically, and react to impacts.
Posts from the unity3d
community on Reddit
Dual-Rig Architecture
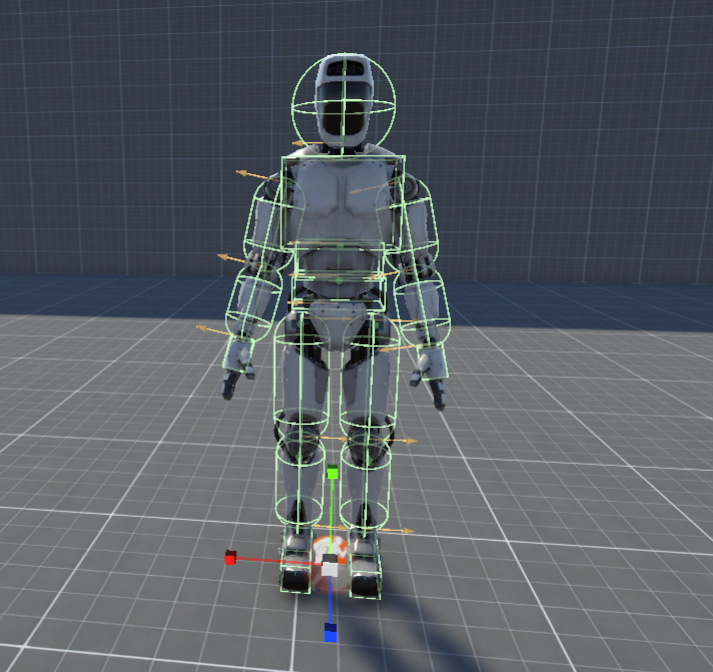
At the core of the system is a dual-rig setup made of two skeletons: an invisible Ghost Rig and a visible Physical Rig. The Ghost Rig handles procedural logic, IK solving, and animation states, defining where the character should be.
The Physical Rig is the actual ragdoll that interacts with the world. It uses Unity’s Configurable Joints, which act like muscles. These joints rely on PID controllers to continuously drive the physical bones toward the pose defined by the Ghost Rig. This separation allows the character to stay physically simulated.

Muscle System, Impacts, and Recovery
Because the system is driven by joint forces, it can adjust muscle tension dynamically through the PID-controlled joints.
When the character is hit by a light object, the system reduces joint strength on specific limbs. This allows those parts of the body to yield to the force, creating localized reactions like flinching, before the joints pull the limb back toward the target pose.
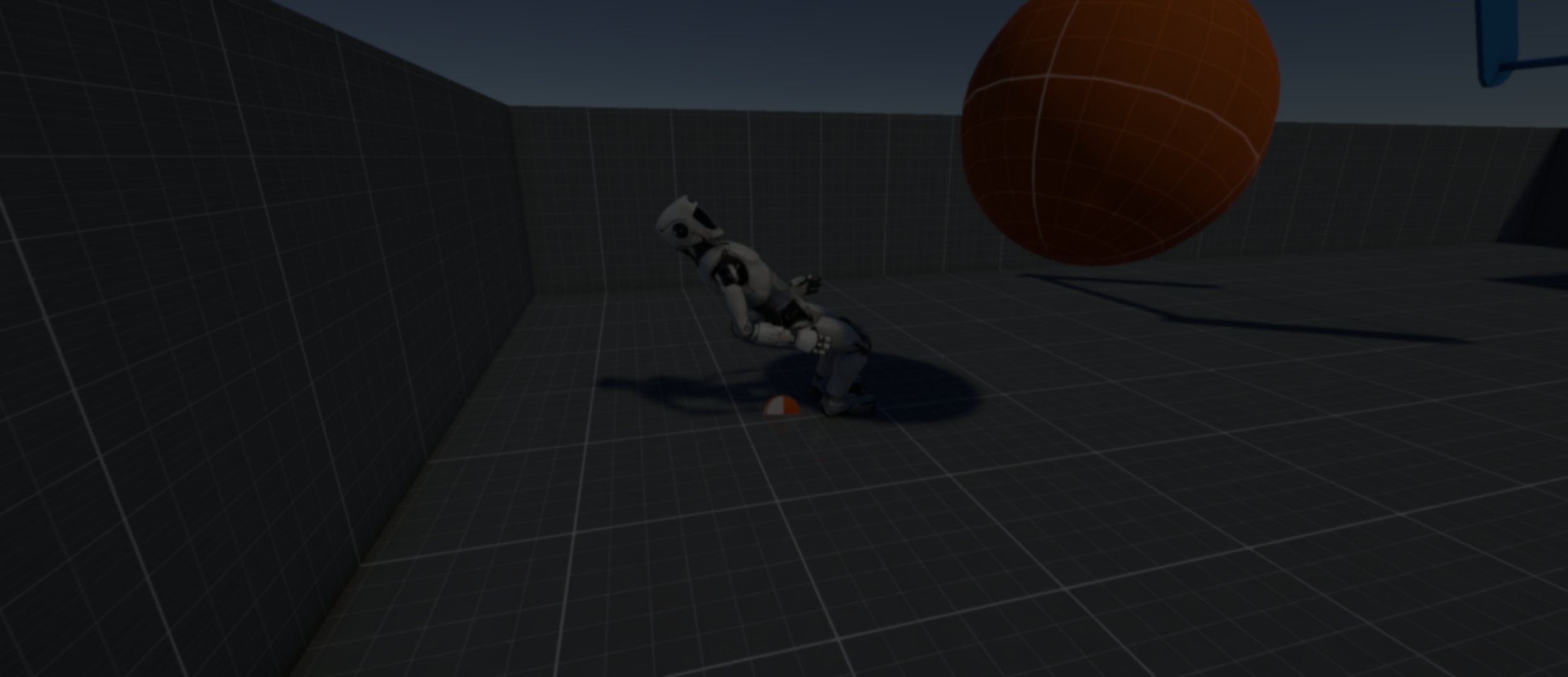
Stronger impacts are handled differently. If the force exceeds a certain threshold, or if the center of mass moves too far outside the character’s support area, the system treats it as a loss of balance. At that point, joint tension is removed entirely, and the character transitions into a fully limp ragdoll.
This lets the body react naturally to situations like falling down slopes or being pushed by external forces, instead of trying to remain artificially upright.
This lets the body react naturally to situations like falling down slopes or being pushed by external forces, instead of trying to remain artificially upright.
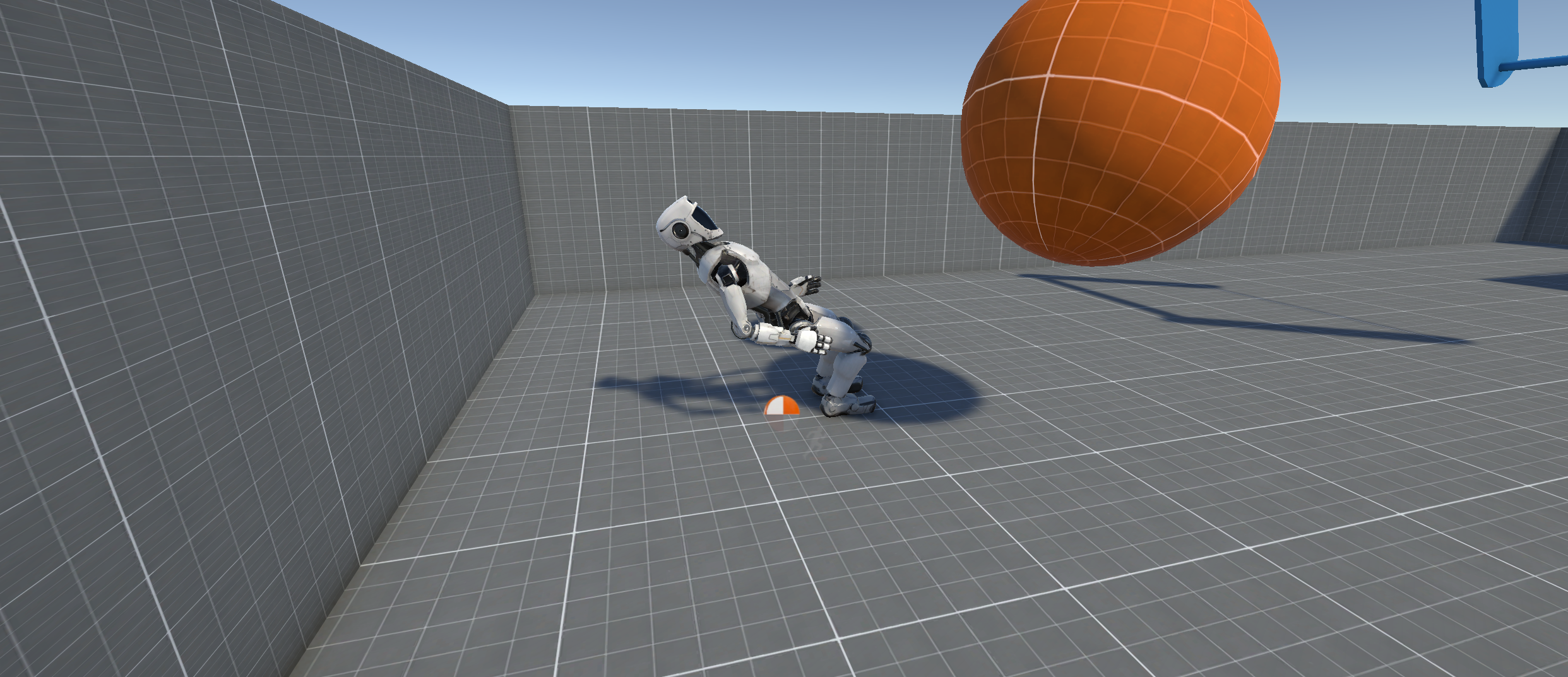
Once the motion settles, a procedural state machine takes over and blends the character back into a standing pose, restoring joint tension and control.
Balance Through an Inverted Pendulum
To maintain stability, the system models the character as an inverted pendulum, using the center of mass as the main reference for balance.
Instead of relying on fixed animations, the solver continuously adjusts the character’s posture to keep that center of mass within a stable range. This includes leaning into turns, shifting weight during movement, and adapting body orientation based on acceleration or terrain.
Locomotion builds on top of this balance system using inverse kinematics (IK) and trajectory prediction. The system evaluates the character’s current movement and projects it forward to estimate where the next step should land. It then casts rays to find a valid ground position that supports balance, adjusting stride length based on speed.
Once a foot makes contact, a foot gluing state machine anchors it to that world position. The foot remains fixed until the gait cycle lifts it again, preventing sliding and ensuring that each step contributes to the character’s physical stability.
Because steps are tied to both predicted motion and balance requirements, movement stays responsive to the environment while maintaining control.
Root Motion and Ground Handling
To reduce instability from collider interactions, the system uses a hover-based root instead of a traditional capsule collider.
A spherecast is used to detect the ground, and a controlled hover force with damping keeps the character’s core stable above the surface. This avoids common issues like snagging on small obstacles while letting the legs handle terrain alignment.
By keeping the root decoupled from direct collision response, the system avoids sudden flips or erratic behavior that can happen when physics-driven characters interact with uneven geometry.
Setup and Additional Features
The system includes a one-click setup that initializes a character with default settings. It currently requires a Humanoid rig.
It can be used alongside Unity’s Animator. Idle and get-up animations can be added, while the walk cycle is handled procedurally. An Avatar Mask can be used to animate the upper body separately.
In terms of performance, the system is described as medium weight. Running more than 5–6 active characters is better suited for PC targets.
Since the system is physics-driven, characters may require tuning depending on their weight and configuration. Certain cases, such as stairs, are not handled well and may need additional adjustment.
The package also includes a character controller and a waypoint system for NPC behavior.
(From Rawad (Rudy) Akar’s YouTube trailer for the tool)
If you’d like to explore more of Rudy’s work and stay updated on the tool, you can check the links below:
- LinkedIn: www.linkedin.com/in/rawad-akar-9533a5b7
- Official website:https://sites.google.com/view/frostpunchgames/home
Interested in learning more?
If you’re working with Unity 6, the Unity 6 Creator Essentials Bundle brings together two books focused on editor tools and character customization.
It includes Unity 6 Editor Tools Essentials and Mastering Character Customization in Unity, and it is aimed at developers and artists interested in building custom tools and more flexible character systems for their projects.
Working with Unity 6? 🛠️ We’ve put together a bundle with two books on editor tools and character customization, available this week at a lower price.
— Jettelly Inc. (@jettelly) March 30, 2026
See it here: https://t.co/ILY3AtWmD4 🏷️#unity3d #gamedev #indiedev pic.twitter.com/TQu9F1HMZg
Jettelly wishes you success in your professional career!
Did you find an error? No worries!
Write to us at [email protected], and we'll fix it!

Level up your Unity skills with Character Customization and Editor Tools!
We invite you to explore "Unity 6 Creator Essentials Bundle", a comprehensive bundle on the concepts and fundamentals seen in this post.
Other posts that might interest you.
-
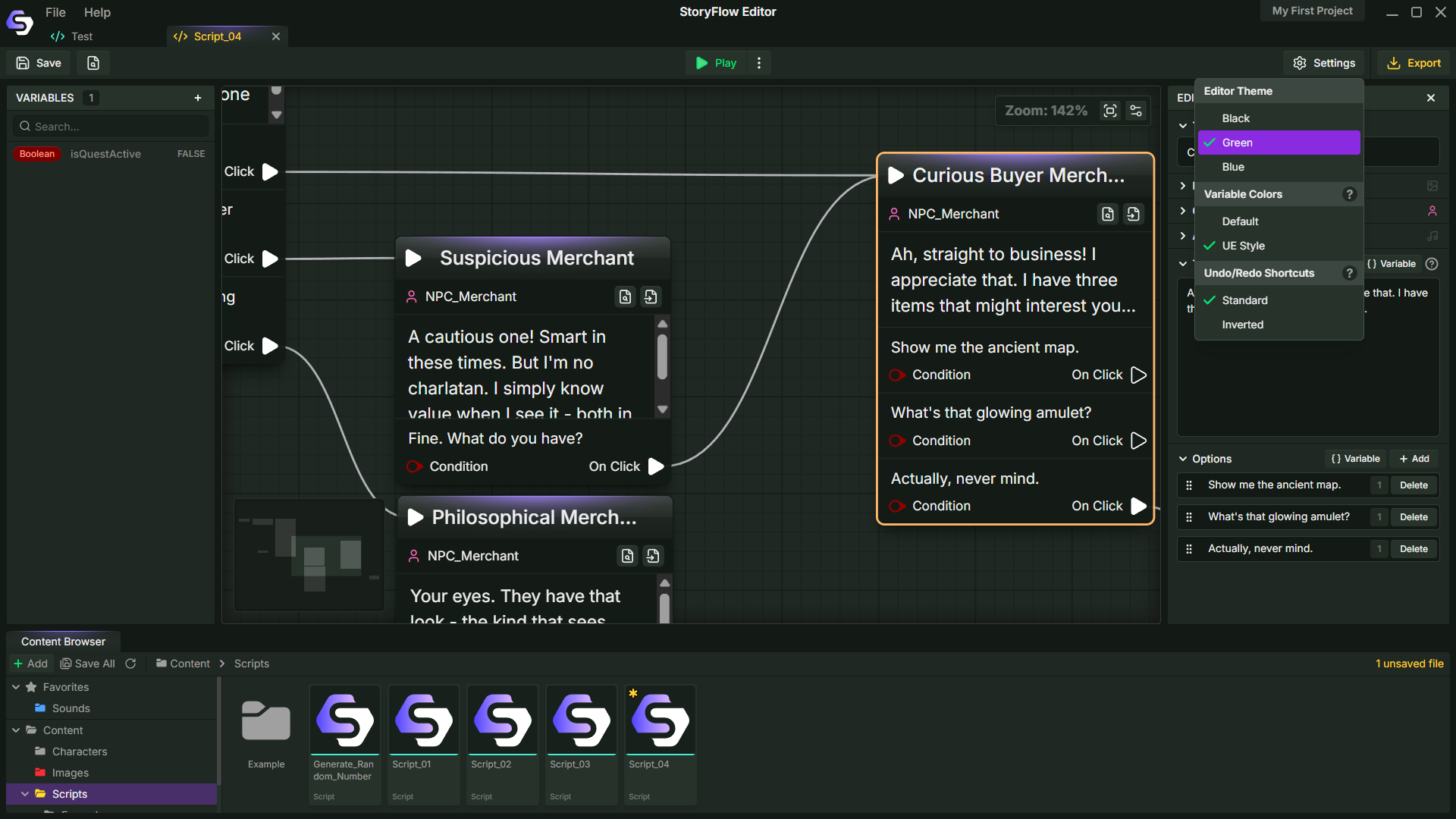 Can dialogue systems be built outside the engine? StoryFlow by Soulsticesyo is a node-based tool for creating branching narratives and bringing them into engines like Godot, Unity, and Unreal.
Can dialogue systems be built outside the engine? StoryFlow by Soulsticesyo is a node-based tool for creating branching narratives and bringing them into engines like Godot, Unity, and Unreal. -
 Developer William Schack released Repetitionless, their paid Unity shader tool that combines multiple techniques to reduce visible texture tiling across materials and terrains.
Developer William Schack released Repetitionless, their paid Unity shader tool that combines multiple techniques to reduce visible texture tiling across materials and terrains. -
 How can character aiming be handled without relying on aim offsets? FocalRig, a Control Rig plugin for UE by Maks Maisak, uses a procedural approach.
How can character aiming be handled without relying on aim offsets? FocalRig, a Control Rig plugin for UE by Maks Maisak, uses a procedural approach.
